 My new 6-wheeled robot platform provides a good starting point to mount an array of sensors. Though I also plan to use this base to experiment with autonomous robotic behavior, my first plan is to add a web-cam and wireless network and be able to control the robot with my iphone! The goal with the iphone is to develop as natural as possible user interface and one very unlike traditional control interfaces.
My new 6-wheeled robot platform provides a good starting point to mount an array of sensors. Though I also plan to use this base to experiment with autonomous robotic behavior, my first plan is to add a web-cam and wireless network and be able to control the robot with my iphone! The goal with the iphone is to develop as natural as possible user interface and one very unlike traditional control interfaces.
I like the idea of controlling a mobile robot with an iphone by using the iphone's accelerometers and digital compass rather than a traditional interface using buttons. The accelerometers add a more natural control interface where movement of the robot and the panning camera is controlled by moving the iphone by changing yaw, pitch and roll. The iphone, and similar emerging devices, are changing the way we interact with the traditionally flat digital realm and instead augmenting reality --- yes, wiki Augmented Reality!
6 legged symmetrical walking robot
Symapod is a hexapod (six-legged) walking robot. Symapod is short for symmetric-hexapod. This is my second robotic walker and this one will be gra nd, I decided this time I would also build it on good looks!
nd, I decided this time I would also build it on good looks!
The body of Symapod: I used the circuit board as the body for weight saving and futuristic looks. The PCB appears to be quite strong but I may add a brass frame if neccessary. Symapod has its legs oriented in a star configuration. This star configuration allows it to instantaneously travel in any direction without turning or re-orientating itself. As you can see in the picture there is no front to Symapod! The head, which is not built yet, will mount in the middle on a 360-degree swivel joint.
Go digital with RC hobby servos
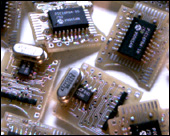 The digital servo controller circuit I have made can be used to create a servo out of any geared-motor and potentiometer, or used to modify any regular hobby servo by replacing the circuit inside the servo. The control bus uses the popular I2C bus standard. The prototype uses a PIC16f873 and takes advantage of it's ADC, PWM and I2C peripherals.
The digital servo controller circuit I have made can be used to create a servo out of any geared-motor and potentiometer, or used to modify any regular hobby servo by replacing the circuit inside the servo. The control bus uses the popular I2C bus standard. The prototype uses a PIC16f873 and takes advantage of it's ADC, PWM and I2C peripherals.
I have completed over 20 working prototypes of the digital servo circuit replacement. These prototypes are being used in my Symapod robot and allow me to read/write to the servos as a series of registers. These registers include the actual and desired position, maximum speed and force being applied to the servo. External sensors can also be connected to the servo and addressed through the same servo interface; this allows each joint to have sensors outside of the servo casing. Servos can also be daisy-chained to make cabling shorter.
I am also an active participant in the openservo project, whose goal is to develop an open source digital servo. I encourage you to take a look and join our group discussions on the openservo forums.
All hobby servos have the standard mounting holes, but there are times when the standard mounting holes do not fit the way you want to mount them. It seems, especially when it comes to robotic applications. This document proposes an alternate method of mounting servos. This document deals with mounting one servo to the shaft of another, although the method can be adopted for many other mounting requirements.
 Your First CPU
Your First CPU